
BotBot

The open-source brain for any legged robot
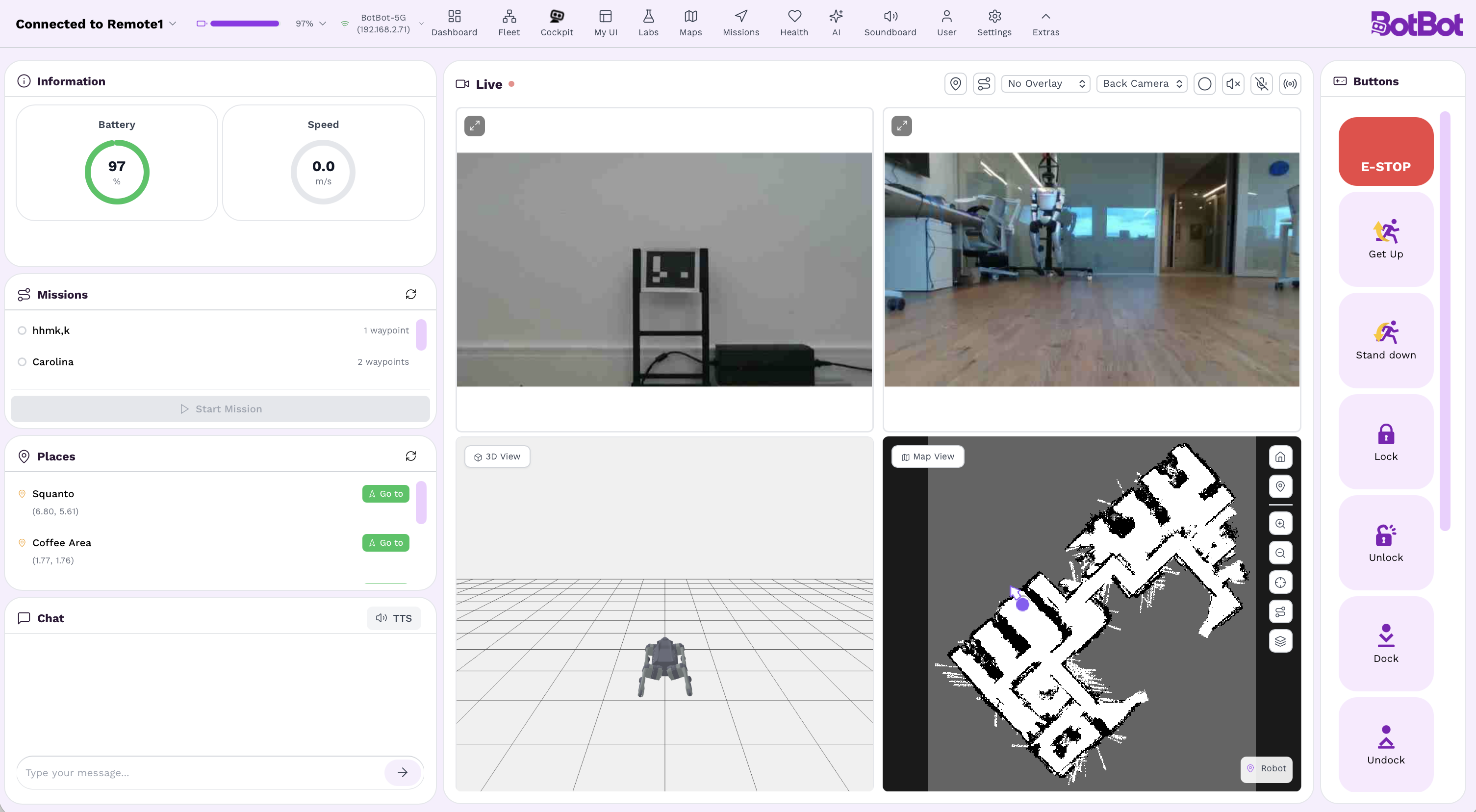
BotBot – Open-source integrated control and navigation for legged and wheeled ROS2 robots
Summary: BotBot is a modular software and hardware platform that enables control, mapping, and autonomous mission execution on legged or wheeled ROS2 robots. It integrates a full ROS2 navigation stack, a web-based user interface, and 3D-printable hardware into a deployable system designed for rapid setup and extensibility.
What it does
BotBot combines the ROS2 Humble navigation stack (Nav2 and RTABMap for SLAM) with a web UI for teleoperation, mission planning, and dashboard customization, alongside open-source 3D-printable hardware built around NVIDIA Jetson and RealSense cameras.
Who it's for
It targets developers, researchers, and operators working with quadrupeds, humanoids, or custom ROS2 robots seeking a foundational platform for autonomous missions.
Why it matters
BotBot addresses the challenge of integrating hardware, navigation, and control software by providing a ready-to-use, modular system that reduces setup time from weeks to under an hour.