
OmniXtreme

Open-source hyperhuman control framework for Unitree G1
OmniXtreme – Open-source control framework for advanced Unitree G1 motion
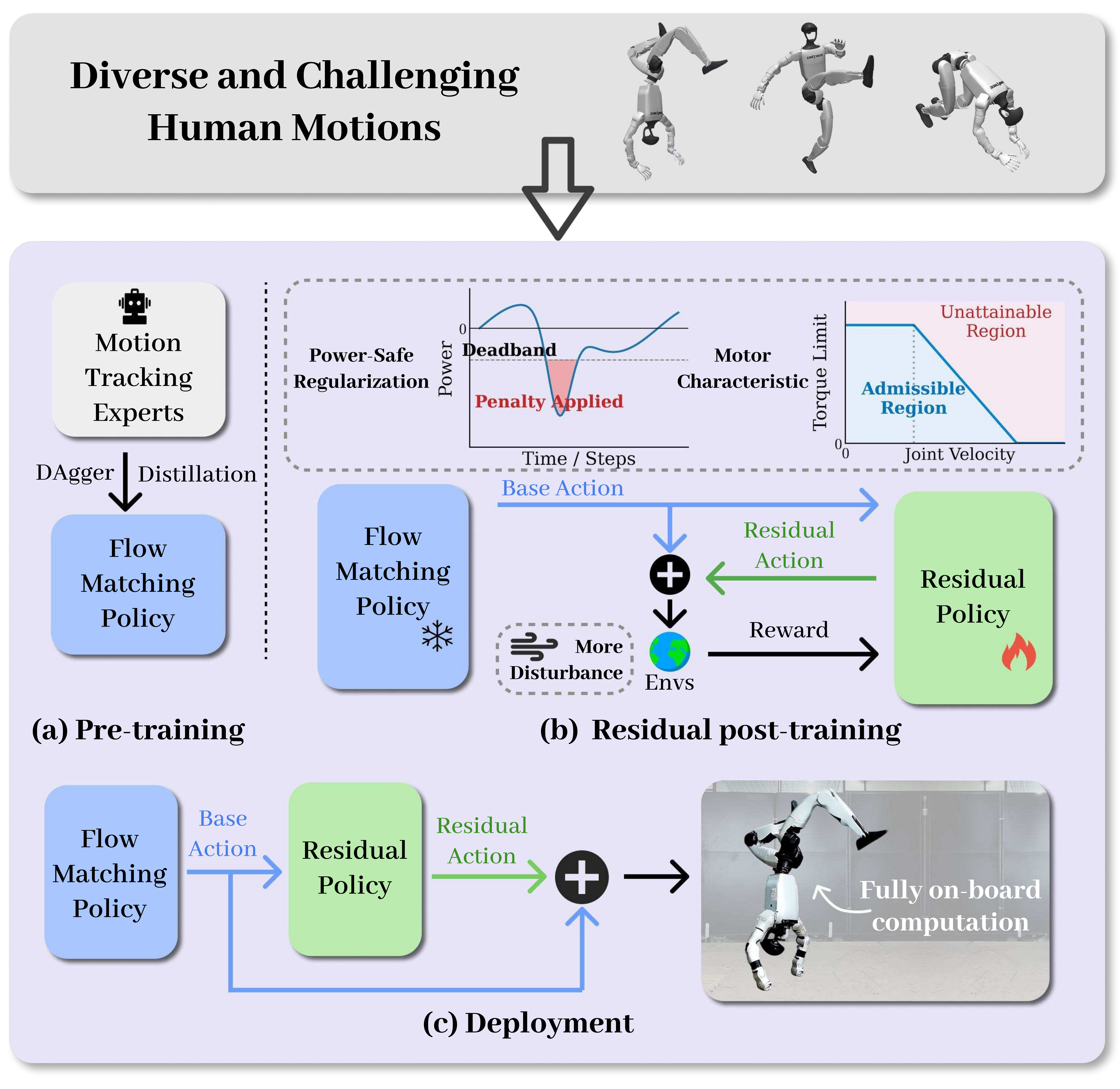
Summary: OmniXtreme is an open-source control framework designed for the Unitree G1 humanoid, combining generative Flow Matching for advanced motion planning with strict motor envelope clipping to prevent hardware damage. It enables extreme dynamic motions like kung-fu and parkour while maintaining motor safety.
What it does
OmniXtreme uses Flow Matching to generate precise, high-performance motion trajectories and applies physical envelope clipping to limit motor stress and avoid mid-air burnouts.
Who it's for
It targets developers and researchers working on humanoid robots, specifically those using the Unitree G1 or exploring adaptation to similar platforms.
Why it matters
The framework balances aggressive motion capabilities with hardware protection, enabling safe execution of complex, high-impact movements on humanoid robots.