
ByteRover Memory System for OpenClaw

File-based memory for OpenClaw with >92% retrieval accuracy
ByteRover Memory System for OpenClaw – File-based memory with 92%+ retrieval accuracy
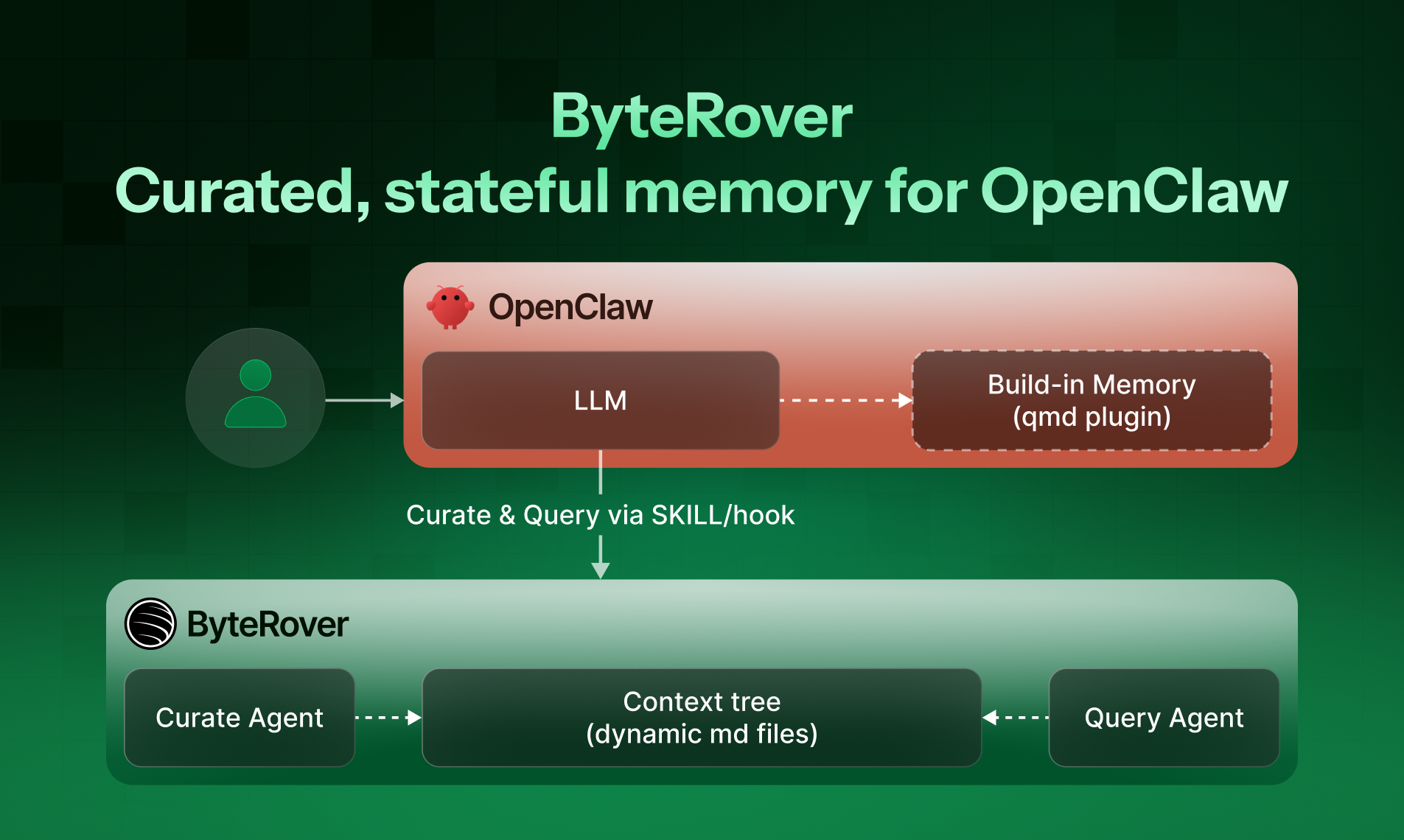
Summary: ByteRover provides a deterministic, file-based memory layer for OpenClaw agents that maintains context timelines, facts, and meaning with over 92% retrieval accuracy. It reduces token usage by selectively retrieving relevant information and supports local-to-cloud portability with built-in version control.
What it does
ByteRover stores agent memory as a .brv/context-tree file in the local environment, selectively feeding agents only necessary context to prevent token overload. It integrates Git-based version control to track memory changes and avoid context drift.
Who it's for
OpenClaw users and developers building autonomous agents who need reliable, stateful memory without excessive token costs or VRAM issues.
Why it matters
It solves agent amnesia by preserving context efficiently, reducing API token consumption, and preventing silent context drift during autonomous workflows.